
Hey everybody, haven't been on here in a while but I've got a question that I figured was appropriate for the GRM brain trust.
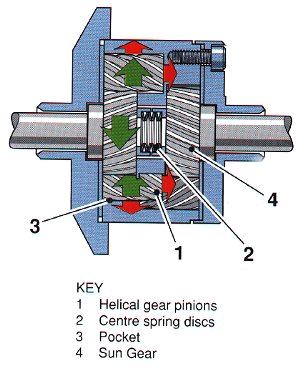
I have been trying to figure out exactly how torque-biasing differentials work, specifically the Quaife type. I think I've got a fairly good understanding of how the axial thrust of the helical gears helps provide higher friction which in turn applies that friction torque to the corresponding side gear. What confuses me is that it appears that the wheel that is turning slower (i.e. backwards when looked at as relative motion) would actually have the most torque applied. For instance if this image is looking at the rear of a car, would the left wheel have more torque applied?
From my rough diagrams it appears this is the case, but due to the inherent design of the gearing this would mean that wheel is moving slower. If this were a right hand corner for instance, the torque on the outside wheel would be beneficial, but shouldn't that wheel also need to turn faster?
When one of two tires on the same axle loses traction, the the one spinning faster is typically going to be the one with less traction and the one spinning slower will be the one with more traction.
1manwolfpack wrote: What confuses me is that it appears that the wheel that is turning slower (i.e. backwards when looked at as relative motion) would actually have the most torque applied.
No, you got it. The faster turning axle is generally the one with less grip, so it works out okay.
In a corner, actual wheel speed differential is fairly low until you get down to parking-lot speeds, so any torque vectoring effects are miniscule at worst. After all, spools/welded diffs work just fine, too.
Yeah that makes sense, particularly if you are trying to stop the one wheel peel type situation or inside rear from spinning. Thanks for the feedback, I guess I was just looking for a sanity check. These things are a bit more confusing than an open diff or a clutch type.

I'm a bit curious about this myself, and since it's related to torque-biasing differentials, it's perhaps not as big of a threadjack as it could be... Most torsen-type diffs (like the one in that picture) can be advertised in terms of the torque bias ratio (TBR). in terms of performance/racing cars, is it common to select the TBR based on how much weight transfer occurs across the driven axle at maximum cornering load?
like say you have a big sedan or a Corvette or something prepped for road racing, with 1250lbs static on each rear wheel, then when cornering as hard as it can, the rear corner weights look more like 1500lbs/1000lbs (outside rear/inside rear) due to weight transfer, would it be appropriate (generally speaking) to have a Torsen with a 1.5:1 TBR? It seems like it would, as the outside tire would be carrying 1.5x the weight of the inside tire, and assuming a somewhat linearly-correlated relationship between available traction and load, the outside tire would have up to 1.5x the traction of the inside tire and be able to handle up to 1.5x the torque, thus making the 1.5:1 TBR appropriate for that chassis/car? or am I completely misunderstanding the situations under which a torsen is doing it's thing?
do bear in mind it's after midnight, so some of my ideas might not be as well-developed as they perhaps could be...
I'm not really sure what is typically done by the pros when selecting a diff, but that seems like a fairly sound argument to me. However, it is probably a bit more complicated than that because the traction available does not vary in a linear fashion with respect to load like a simple friction model.
That seems like a good place to start though.
1manwolfpack wrote:
Thanks for the feedback, I guess I was just looking for a sanity check. These things are a bit more confusing than an open diff or a clutch type.
Extra fun is that torsens ARE open diffs. That's why they're so nice for turn-in.
They don't limit slip, they just have a variable torque bias instead of the fixed 50/50 of a bevel-gear diff. A torsen will happily allow one axle to be stationary while the other spins to the moon, as long as the torque being transmitted through them is within the bias ratio.
In reply to Knurled: Yeah that would be true, it seems like most people would classify them as "limited slip differentials" but they aren't really "limiting slip"


























